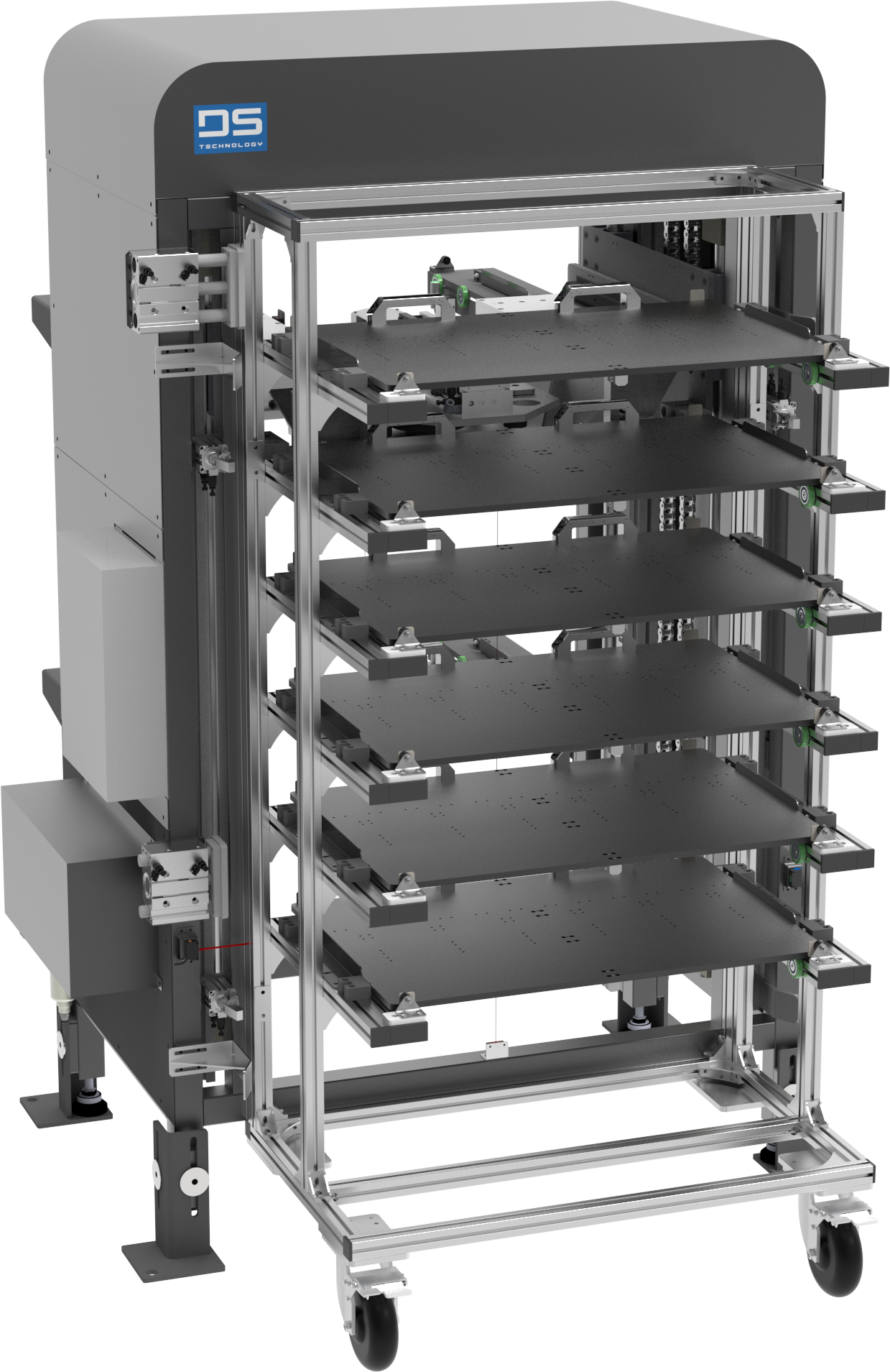
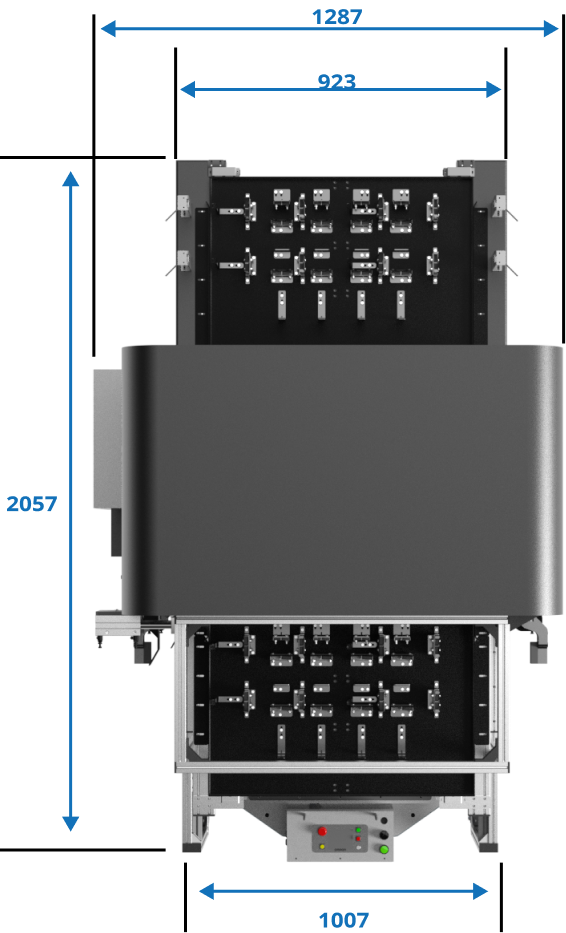
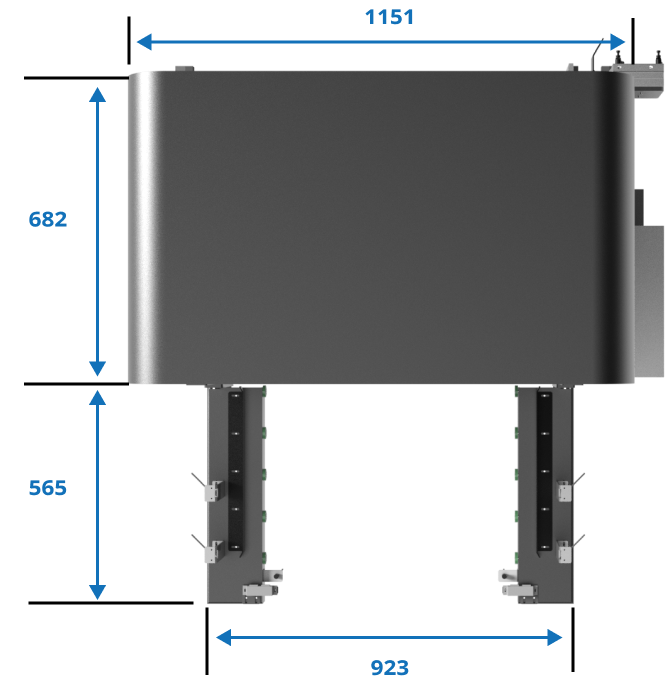
省スペース・多層積載設計
ロボット統合に最適なワークピースハンドリングスペース
手動トロリーとの統合による操作利便性の向上
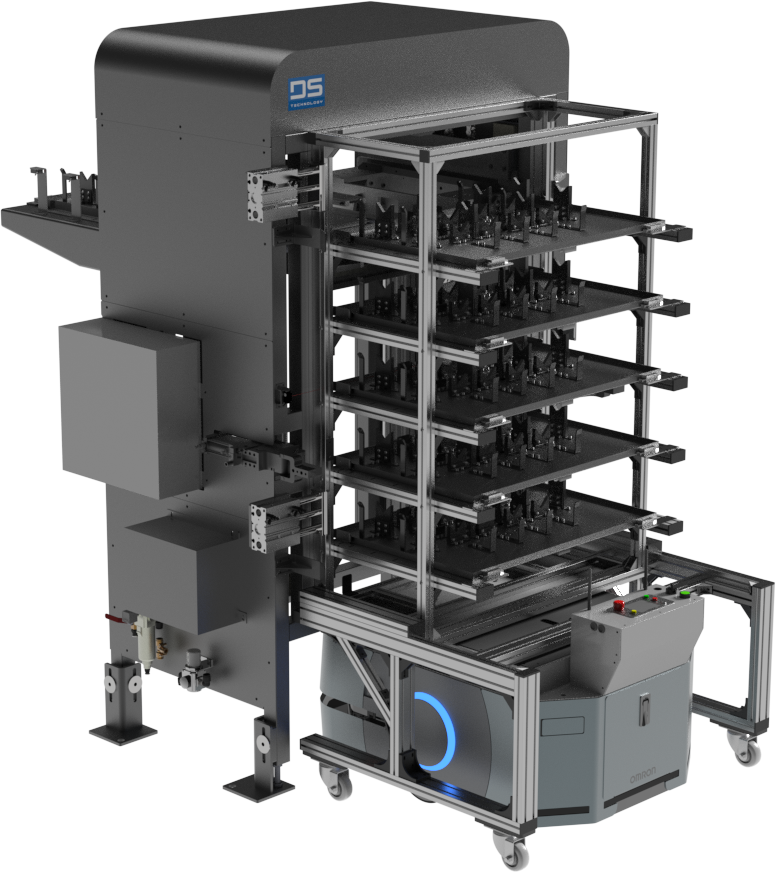
多工程統合とバッチ処理
AGVまたはAMRとの統合による自動運搬と人件費の削減
ガントリーまたは6軸ロボットとの互換性
ユーザーフレンドリーで直感的な操作性
優れたコストパフォーマンス
柔軟な治具交換性により、システムの高い汎用性を実現
リアルタイムデータの追跡と監視
エネルギー効率に優れた環境配慮型システム
職場安全性の向上
高い互換性と統合性